1.芯片启动
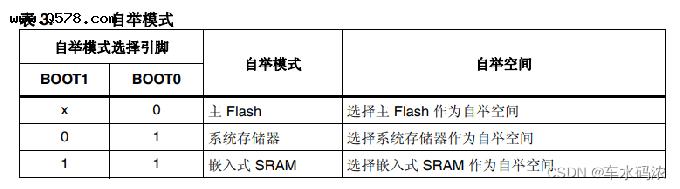
首先stm32会根据启动方式(参考手册2.4节)从启动位置加载启动代码到内存中,之后开始执行启动代码,一般启动代码使用官方提供的即可 ———- xxx.s
启动代码的工作:
初始化堆栈空间,定义异常向量表 调用SystemInit ———– 系统初始化 初始化时钟,调整异常向量表 执行main ———- 主函数
芯片要开始工作,必须初始化时钟和内存,stm32的内存使用片内SRAM,可以直接使用,时钟需要初始化,ARM芯片需要定义异常向量表,执行C语言代码必须初始化堆栈。
stm32f407推荐的主时钟频率 168MHz
2.产生原始频率的硬件
(1)晶振
(2)RC(LC)振荡电路
原始频率不会很高,使用前必须升频,升频使用PLL(升频)电路
CPU时钟系统的大体结构
3.stm32f407的原始时钟
HSI RC ————– 高速内部振荡时钟 16M HSE OSC ————- 高速外部晶振 4~26M(8M) //以上两个时钟源可以直接作为系统主时钟,也可以通过PLL升频后作为主时钟 LSI RC ————— 低速内部振荡时钟 32K —– 看门狗 LSE OSC ————– 低速外部晶振 32.768K —– RTC
stm32f407的时钟树
PLL的输出时钟 = PLL输入时钟 X PLLN / PLLM / PLLP
168M = 8M X 336 / 8 / 2
4.将keil5的工程的系统时钟配置为168MHz
(1)修改system_stm32f4xx.c的254行
#define PLL_M 8
(2)修改stm32f4xx.h的127行
//该文件是只读属性文件,要去文件系统中找到该文件,去掉只读属性 #define HSE_VALUE ((uint32_t)8000000) /*!< Value of the External oscillator in Hz */
练习:
将系统主频配置为168M
修改PLL,调节系统主频
#define PLL_N 336//168M #define PLL_N 432//216M 超频 #define PLL_N 168//84M 降频
系统总线时钟频率:
SYSCLK时钟 ———— 168MHz HCLK/AHB总线 ———- 168MHz APB1时钟 ————– 42MHz APB2时钟 ————– 84MHz
按键驱动
1.看原理图
从原理图可知:
按键松开 ——– 引脚高电平
按键按下 ——– 引脚低电平
按键对应的引脚:
S1 —– PA0
S2 —– PE2
S3 —– PE3
S4 —– PE4
如何读取输入引脚的电平
(1)读取输入数据寄存器(IDR)对应位的值 1 —– 输入高电平 0 —– 输入低电平
(2)位段操作 PAin(0)==0 —– 输入低电平 PAin(0)==1 —– 输入高电平
(3)库函数 uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin); //传入哪一组哪个脚,返回该引脚的电平
练习:
完成其他三个按键的检测程序,分别使用 寄存器 位段 库函数判断
实现一下功能:
按下S2,D2亮 按下S3,D3亮 按下S4,D4亮
//key.c
#include
#include
void key_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//1.开启GPIOA的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOE,ENABLE);
//2.GPIO初始化 PA0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN;//输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;//无上下拉
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//PA0
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4;//PE2 PE3 PE4
GPIO_Init(GPIOE,&GPIO_InitStruct);
//main.c
#include
#include
#include
#include
int main()
{
int key_flag = 0;
//初始化
led_init();
key_init();
while(1){
if(S1==0){
//延时消抖10ms
delay(100);
if(S1==0){
//真实按键事件
if(key_flag==0){//按下没有松开
D1 = ~D1;//取反
key_flag = 1;
}
}
}
else{
//延时消抖10ms
delay(100);
if(S1){
key_flag = 0;
}
}
}
}
//lcd.c
include
#include
void delay(unsigned int ms)
{
int i,j;
for(i=0;i<ms;i++)
for(j=0;j<5000;j++);
}
void led_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//1.开启GPIOE GPIOF的时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE|RCC_AHB1Periph_GPIOF,ENABLE);
//2.GPIO初始化 PF9 PF10 PE13 PE14
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT;//输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;//高速
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;//无上下拉
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;//PF9 PF10
GPIO_Init(GPIOF,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14;//PE13 PE14
GPIO_Init(GPIOE,&GPIO_InitStruct);
//3.LED默认关闭
GPIO_SetBits(GPIOF,GPIO_Pin_9|GPIO_Pin_10);
GPIO_SetBits(GPIOE,GPIO_Pin_13|GPIO_Pin_14);
}
//lcd.h
#ifndef _LED_H_
#define _LED_H_
#define D1 PFout(9)
#define D2 PFout(10)
#define D3 PEout(13)
#define D4 PEout(14)
void delay(unsigned int ms);
void led_init(void);
#endif
//key.h
#ifndef _KEY_H_
#define _KEY_H_
#define S1 PAin(0)
#define S2 PEin(2)
#define S3 PEin(3)
#define S4 PEin(4)
void key_init(void);
#endif
//sys.h 该文件由系统定义
#ifndef __SYS_H_
#define __SYS_H_
#include “stm32f4xx.h”
//IO口操作宏定义
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
//IO口地址映射
#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414 20 = 0x14
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014
#define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010 16 = 0x10
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010
//IO口操作,只对单一的IO口!
//确保n的值小于16!
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入
#define PBout(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PBin(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入
#define PCout(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PCin(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入
#define PDout(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PDin(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入
#define PEout(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PEin(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入
#define PFout(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PFin(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
#define PGout(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PGin(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入
#define PHout(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PHin(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入
#define PIout(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PIin(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入
#endif
3.按键消抖————延时消抖
以上按键程序不管是否有按键事件发生,都会占用CPU来进行判断,这种方式叫做轮询,效率比较低,CPU提供了效率更高的方式 ——— 中断。